With the continuous deepening of wireless sensor network research, applications have gradually become the focus of attention. Various researches are emerging in the context of specific applications, such as environmental monitoring, target tracking, and security monitoring. Location information is essential to the monitoring activities of the sensor network. The location of the event or the location of the node that obtains the information is the important information contained in the monitoring message of the sensor network node. Understanding the location information of the sensor node can not only obtain routing information, but also locate the node Wait. The error of distance measurement largely determines the error of target positioning and tracking. Commonly used positioning methods must measure the distance between nodes, and the general ranging methods include infrared, GPS, ultrasonic, and received signal strength indicator (RSSI).
Infrared, GPS, and ultrasonic ranging all require additional hardware, increasing the hardware cost and size of the node. GPS and infrared distance measurement errors are large, and the ultrasonic method is very accurate. The distance measurement error is only 10 cm, but it is greatly affected by temperature and humidity, and is not suitable for outdoor use. RSSI-based positioning does not require additional hardware. Using the judgment of the strength of the received wireless signal to derive the distance between the transceiver nodes and calculating the strength of the received wireless signal is a function of commercial wireless transceiver chips. The RSSI-based ranging provides the cheapest positioning method, and the node does not add any components. Although ultrasonic-based distance measurement has high positioning accuracy, it needs to add hardware and increase node cost and size. Therefore, ranging based on RSSI is a more commonly used method for wireless sensor network positioning. First, preprocess the RSSI, and then predict the value of the distance through the prediction model, which not only improves the accuracy of the RSSI-based distance measurement, but also achieves low-cost distance measurement.
1 BP network model structure and algorithm
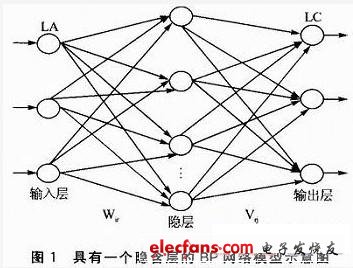
BP network is a feedforward network that adopts the error back propagation algorithm as its learning algorithm in the neural network. It is usually composed of an input layer, an output layer, and a hidden layer (one or more layers). The neurons between layers are fully connected, and are connected to each other through the corresponding network weight coefficient w. There is no connection between neurons in each layer. Figure 1 shows a BP network model with a hidden layer. Among them: LA is the input layer of the BP neural network, LB is the hidden layer, LC is the output layer, Wir is the weight of the hidden layer and the input layer, and Vrj is the weight of the output layer and the hidden layer.
2 Experimental platform and data preprocessing
2.1 Get RSSI value
The experiment was conducted in an open, unobstructed square. Based on the TIny () S system, the Iris node of Kersbo is used as the experimental platform, and the No. 0 node is a fixed node for receiving data. Both the sending and receiving nodes use short rod antennas, and the node placement height is about 2 m. Fixed node 0, mobile transmitting node. After a lot of experimental analysis, it is found that RSSI changes more obviously with the increase of distance in the range of 10 m, and after 10 m, the RSSI value does not change significantly with distance. If the measurement distance exceeds 10 m, the accuracy of the distance measurement cannot be guaranteed, so the test range of this experiment is limited to 0 to 10 m. The experimenter took the mobile node and walked evenly along the straight line from the fixed node. When he reached 10 m, he stopped receiving data and recorded the experimental data of the entire continuous movement process.
The three staff members hold the mobile terminal and move forward at a constant speed in the range of 0 to 10 m. The relationship between the RSSI value and the distance is shown in Figure 2.
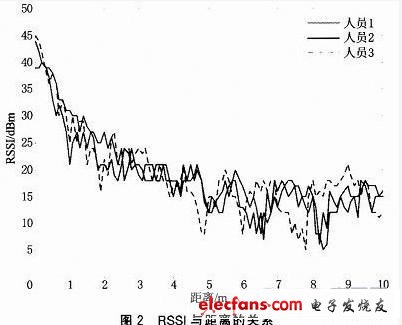
It can be seen from FIG. 2 that different persons carry the mobile terminal forward, and the relationship curve between RSSI and distance is basically consistent, indicating that the relationship between RSSI value and distance conforms to a certain attenuation rule.
Under the same experimental platform, within the range of 0 to 10 m, the RSSI value is recorded at intervals of 0.2 m or 0.3 m. Each distance receives about 100 data packets. The RSSI is first averaged and then the RSSI is obtained The relationship between the value and the distance is shown in Figure 3.
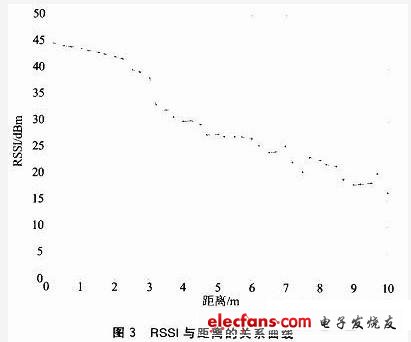
Comparing Figure 2 and Figure 3, it can be concluded that the curve of the relationship between RSSI value and distance in a paused walk is smoother and slower than a continuous walk. Because when walking continuously, the signal will be affected by the walking of the human body or the interferences next to it, and there will be different degrees of mutation. In order to ensure the accuracy of the distance prediction value, the data of the pause measurement is used as the test sample.
Led Garden Lights,Best Solar Garden Lights,Solar Garden Lanterns,Solar Outdoor Christmas Light
Jiangmen Biaosheng Solar Energy Technology Co., Ltd. , https://www.bsprosolar.com